Kilka słów o samym regulatorze
Regulator PID jest urządzeniem składającym się z trzech członów:
- P – proporcjonalnego, mnożącego wartość uchybu od wartości zadanej przez jakiś mnożnik zazwyczaj nazwany „kp”
- I – całkującego, w dużym uproszczeniu obliczającego pole pod wykresem sygnału wejściowego (jest to nie do końca poprawne wyjaśnienie ponieważ człon całkujący potrafi osiągać wartości ujemne, jednak pozwala zrozumieć zasadę działania)
- D – różniczkującego, z definicji obliczającego różnicę między dwoma położonymi nieskończenie blisko punktami na wykresie. Można tłumaczyć sobie to jako swego rodzaju ‚współczynnik zmian’
Regulatory PID mają za zadanie ustawić, a następnie utrzymać wartość wyjściową (np. temperaturę) na zadanym poziomie w jak najszybszy i stabilny sposób.
Przykładowy kod regulatora temperatury
Program wykorzystuje Arduino wyświetlacz 16×4, sterownik termopary typu K MAX31855
#include <LiquidCrystal.h>
#include <SPI.h>
#include "Adafruit_MAX31855.h"
#define MAXDO 12
#define MAXCS 10
#define MAXCLK 13
#define rs 7
#define en 6
#define d4 5
#define d5 4
#define d6 3
#define d7 2
#define PWM_pin 11
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
Adafruit_MAX31855 thermocouple(MAXCLK, MAXCS, MAXDO);
unsigned long aktualnyCzas = 0;
unsigned long zapamietanyCzas = 0;
unsigned long roznicaCzasu = 0;
float temperature_read = 0.0;
float set_temperature = 70;
float PID_error = 0;
float previous_error = 0;
float elapsedTime, TimePID, timePrev;
int PID_value = 0;
int output = 0;
float kp = 15; float ki = 0.15; float kd = 50;
int PID_p = 0; int PID_i = 0; int PID_d = 0;
void setup() {
lcd.begin(16, 4);
Serial.begin(9600);
pinMode(PWM_pin,OUTPUT);
TCCR2B = TCCR2B & B11111000 | 0x03; // pin 3 and 11 PWM frequency of 980.39 Hz
TimePID = millis();
}
void loop(){
temperature_read = thermocouple.readCelsius();
analogWrite(PWM_pin,output);
aktualnyCzas = millis();
roznicaCzasu = aktualnyCzas - zapamietanyCzas;
if (roznicaCzasu >= 1000UL) {
zapamietanyCzas = aktualnyCzas;
//Serial.println(aktualnyCzas);
output = PID(temperature_read);
lcd_display();
}
}
double PID(float inp){
PID_error = set_temperature - inp;
PID_p = kp * PID_error;
//Calculate the I value in a range on +-3
if(-3 < PID_error && PID_error < 3)
{
PID_i += PID_error * elapsedTime;
}
//For derivative we need real time to calculate speed change rate
timePrev = TimePID; // the previous time is stored before the actual time read
TimePID = millis(); // actual time read
elapsedTime = (TimePID - timePrev) / 1000;
//Now we can calculate the D calue
PID_d = kd*((PID_error - previous_error)/elapsedTime);
//Final total PID value is the sum of P + I + D
PID_value = PID_p + PID_i + PID_d;
if(PID_value < 0)
{ PID_value = 0; }
if(PID_value > 255)
{ PID_value = 255; }
previous_error = PID_error; //Remember to store the previous error for next loop.
return PID_value;
}
void lcd_display(){
char buffer[16];
lcd.clear(); //
lcd.setCursor(0,0); //
lcd.print("Zadana: "); //
lcd.setCursor(8,0); //
lcd.print(set_temperature); //
lcd.setCursor(14,0); //
lcd.print("C"); //
lcd.setCursor(0,1); //
lcd.print("Odczyt: "); //
lcd.setCursor(8,1); //
lcd.print(temperature_read); // Wyświetlanie pierwszych trzech linijek lcd
lcd.setCursor(14,1); //
lcd.print("C"); //
lcd.setCursor(0,2); //
lcd.print("PWM: "); //
lcd.setCursor(5,2); //
lcd.print(PID_value); //
lcd.setCursor(11,2); //
lcd.print((100*PID_value)/255); //
lcd.setCursor(14,2); //
lcd.print("%"); //
sprintf(buffer, "P:%d", PID_p); //
lcd.setCursor(0,3); //
lcd.print(buffer); //
sprintf(buffer, "I:%d",PID_i); //
lcd.setCursor(5,3); // Wyświetlanie ostatniej linijki lcd
lcd.print(buffer); // w ten sposób nie wyświetlają się
sprintf(buffer, "D:%d", PID_d); // "krzaki" na wyswietlaczu
lcd.setCursor(10,3); //
lcd.print(buffer); //
}
Dlaczego człon I działa dopiero w zakresie błędu +/- 3?
Człon I ze względu na zasadę jego działania bardzo szybko osiąga bardzo wysokie wartości. Początkowa temperatura jest niska, więc pole pod wykresem z czasem bardzo szybko rośnie. Potrafi to doprowadzić do dużego przesterowania regulatora, a co za tym idzie – wzrostu temperatury wysoko ponad temperaturę zadaną. Najprościej można zapobiec temu na dwa sposoby:
- Wprowadzając limit wartości jaką może osiągnąć człon całkujący
- Ograniczając działanie członu całkującego do pewnego zakresu w pobliżu wartości zadanej
Prezentacja działania regulatora
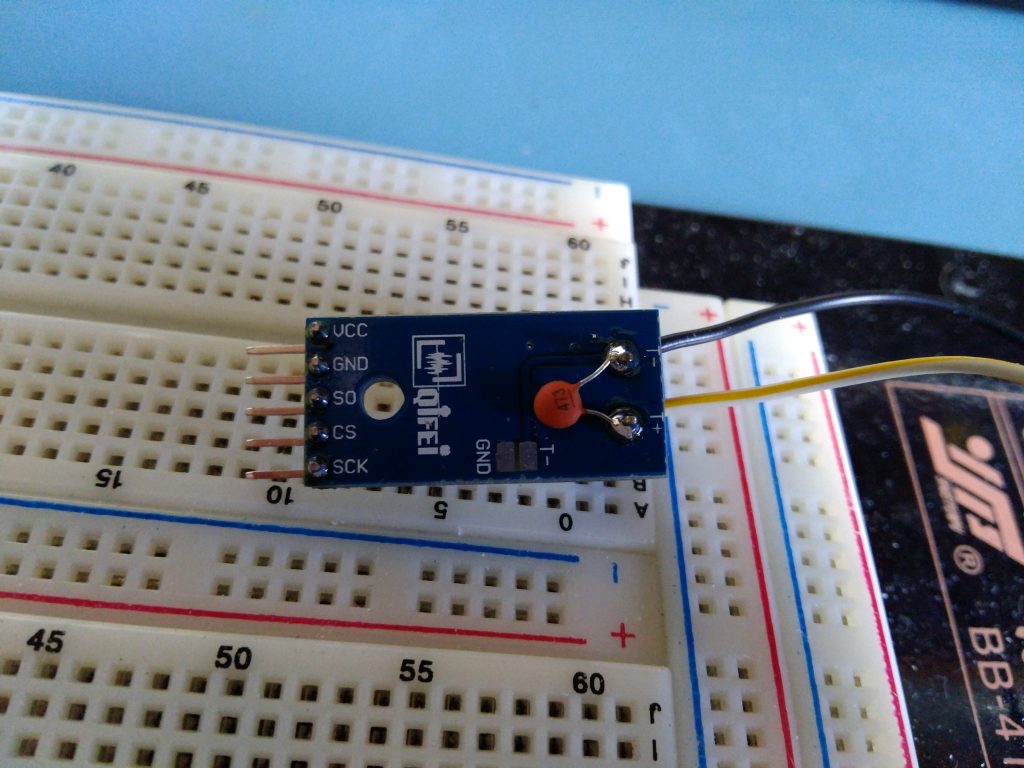
Kilka słów o MAX31855 i jego chińskiej podróbce
Korzystając z najtańszego sterownika MAX31855 z Ebaya czy Aliexpress możemy napotkać spore problemy z uruchomieniem modułu. W moim przypadku obsłużyć go potrafiła jedynie biblioteka od Adafruit (https://github.com/adafruit/Adafruit_MAX31865). Niestety po uruchomieniu, Arduino odczytywało losowe wartości temperatury. Rozwiązaniem okazało się dolutowanie kondensatora 47nf pomiędzy zaciski termopary w module. Po tym zabiegu wszystko działa idealnie.